
 Galería de imágenes: Autos deportivos. El legendario piloto Barney Oldfield se prepara para una vuelta en 1905. Ver fotos de autos deportivos.
Galería de imágenes: Autos deportivos. El legendario piloto Barney Oldfield se prepara para una vuelta en 1905. Ver fotos de autos deportivos.
Según Doug Milliken, autor de "Race Car Vehicle Dynamics", el término arado fue acuñado por el piloto Barney Oldfield durante una carrera en una pista de tierra. Al tomar una curva a alta velocidad con un auto de motor delantero pesado, las ruedas delanteras siguieron rectas, excavando surcos como un arado. Esta anécdota resume el subviraje [fuente: CMA Consulting].
Hoy, el arado describe el subviraje: el impulso forward mantiene las ruedas delanteras rectas en lugar de seguir la curva. Aunque el volante las gira, crean bordes que se clavan en el suelo en vez de rodar suavemente.
En tierra, genera surcos; en asfalto caliente, destroza neumáticos; en césped, daña el pasto gravemente.
Si una rueda pierde agarre, las demás pueden derrapar o volcar, especialmente en pendientes.
Por eso, Cub Cadet desarrolló Synchro-Steer en 2009. Este sistema ofrece giros de radio cero, pivotando sobre un punto en el eje trasero. A diferencia de otros, controla las cuatro ruedas, reduce el arado, minimiza daños al césped y mejora estabilidad y tracción en cualquier terreno o clima.
Para entender Synchro-Steer, revisemos la física básica de la dirección.
Física básica de la dirección
Al conducir un auto o tractor cortacéspedes, ignoramos desafíos físicos que el diseño resuelve. El motor genera potencia, transmitida a las ruedas para movimiento rectilíneo.
Pero las curvas son inevitables, como al cortar césped de lado a lado (giros de 180°).
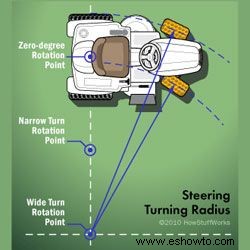
La dirección altera el movimiento lineal a circular. Rudolph Ackerman patentó en 1818 el sistema donde las ruedas delanteras giran diferente para converger en un centro de giro común [fuente: NTBA].
En giros amplios, el centro está lejos; en cerrados, cerca; en radio cero, en el eje trasero.
En 1963, John Reiger inventó el primer cortacéspedes de giro cero, el Hustler, eliminando giros amplios.
Los diseños se mantuvieron similares por décadas. A continuación, cómo Synchro-Steer los mejora.
El sistema de dirección sincronizada
 No todos los céspedes son planos: baches, humedad y pendientes desafían al tractor.
No todos los céspedes son planos: baches, humedad y pendientes desafían al tractor.
Los cortacéspedes de giro cero usan dos transmisiones traseras independientes (controladas por lap bars) para giros: una rueda gira más rápido, pivotando.
Las ruedas delanteras son caster libres (360°), sin motor, pero en terrenos irregulares resisten, causando subviraje delantero o derrapes traseros y daños al césped.
Synchro-Steer inicia el giro en las ruedas delanteras vía volante y caja de dirección, sincronizando velocidades traseras con enlaces directos.
En un giro a la izquierda, reduce velocidad en rueda trasera izquierda, transfiriendo potencia a la derecha para radio cero sin resistencia delantera ni patinaje.
Integra dirección Ackerman con giro cero, eliminando el arado de Oldfield.
Para más detalles, consulta la siguiente página.